

2023-07-12
2. Behandlung der Kurzschluss-Störung des ABB-Roboter-Energie-Modul-Kurzschluss-Brettes
Menschliche Seiten: Hardware des heißen abwechselnden Ein- und Auslagerns ist sehr gefährlich, und viele Leiterplatteausfälle werden durch das heiße abwechselnde Ein- und Auslagern verursacht. Missbräuchliche Verwendung der Kraft, wenn sie Karten und Stecker mit Energie einfügt, kann Schaden der Schnittstellen, die Chips, etc. verursachen und führen, um zur RoboterLeiterplatte zu beschädigen; Da die Zeit der Anwendung von Roboterzunahmen, die Komponenten auf der RoboterLeiterplatte natürlich altern und führen zu RoboterLeiterplatteausfälle.
Umweltfaktoren: Wegen der unsachgemäßen Wartung durch den Betreiber, wird die RoboterLeiterplatte mit Staub umfasst, der Signalkurzschlüsse verursachen kann.
3. Wann es notwendig zu den Ersatzindustrierobotern ist
Nach der ersten Energie an der neuen Maschine.
Vor der Herstellung irgendwelcher Änderungen.
3. Nach dem Abschluss der Änderungen.
4. Wenn Industrieroboter wichtig sind, sollten sie einmal wöchentlich regelmässig getan werden.
5. Es ist am besten, eine Unterstützung auf dem USB-Antrieb auch zu machen.
6. löschen Sie regelmäßig alte Unterstützungen, um Festplattenspeicher oben freizugeben.
4. Wie man die Situation, in der der Roboter eingeschaltet wird und das Unterrichten hängend hält die, folgende Schnittstelle anzuzeigen behandelt
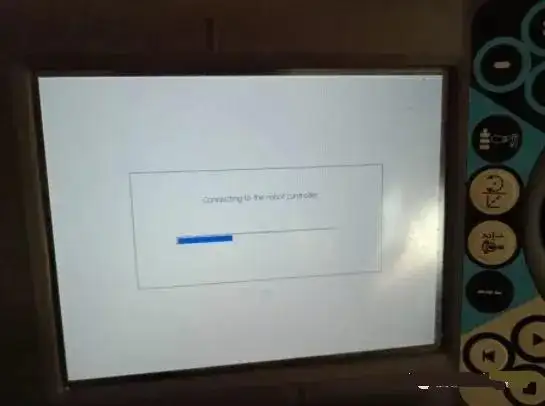 Die oben genannte Situation ist, dass es keine Kommunikationsverbindung gibt, die zwischen dem Unterrichten hängend und dem Hauptprüfer des Roboters hergestellt wird, und die Gründe für die Festlegung nicht der Verbindung einzuschließen:
Die oben genannte Situation ist, dass es keine Kommunikationsverbindung gibt, die zwischen dem Unterrichten hängend und dem Hauptprüfer des Roboters hergestellt wird, und die Gründe für die Festlegung nicht der Verbindung einzuschließen:
1. Der Roboterwirt ist fehlerhaft.
2. Die eingebaute CF-Karte (Sd-Karte) des Roboterwirtes ist fehlerhaft.
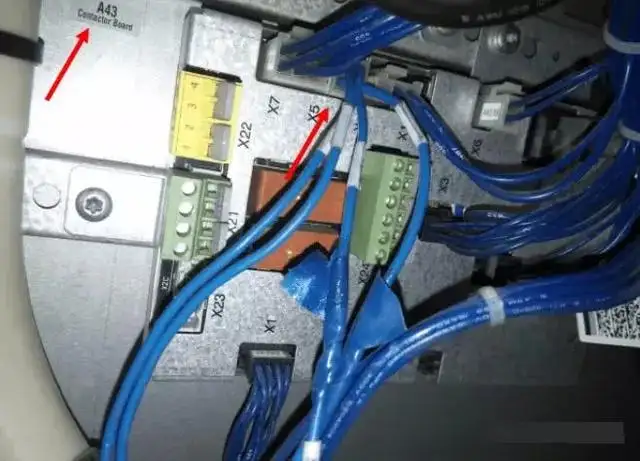
3. Das Netzkabel zwischen dem unterrichtenden Anhänger und dem Wirt ist lose, etc.
Verarbeitungsmethode: 1. Überprüfen Sie, ob der Wirt normal ist und ob die Sd-Karte im Wirt normal ist.
2. Überprüfen Sie, ob das Netzkabel vom unterrichtenden Anhänger zum Wirt richtig angeschlossen wird.
5. Was ist die Bedeutung der Zeitanzeige der Wartung 10106, wenn der Roboter eine Warnungsmitteilung anzeigt?
Diese Situation ist eine intelligente Anzeige der periodischen Wartung ABB-Roboters.
6. Wie man eine Systemfunktionsstörung behandelt, wenn der Roboter einen Zustand der Energie an einträgt?
1. Starten Sie den Roboter einmal neu.
Wenn nicht, überprüfen Sie den unterrichtenden Anhänger auf ausführlicheren Warnungsaufforderungen und Maßnahmen zu ergreifen.
3. Wiederanlauf.
4. Wenn er nicht noch freigegeben werden kann, Start des Versuchs B.
5. Wenn es noch nicht funktioniert, versuchen Sie bitte p-Start.
6. Wenn es noch nicht funktioniert, versuchen Sie bitte mich Start (dieses bringt den Roboter zu seinen Werkseinstellungen zurück, gibt acht).
7. Kann Roboterunterstützung durch mehrfache Roboter geteilt werden?
Nr., zum Beispiel kann die Unterstützung von Roboter A für Roboter A, nicht für Roboter B oder C nur benutzt werden, während diese Systemfehler verursachen kann.
8. Welche Dateien können in der Roboterunterstützung geteilt werden?
Wenn zwei Roboter vom gleichen Modell und von Konfiguration sind. Sie können das SCHNELLE Programm und EIO-Datei teilen, aber, nachdem es geteilt hat, muss es auch überprüft werden, bevor es normalerweise verwendet werden kann.
9. Was ist der mechanische Ursprung von Robotern? Wo ist der mechanische Ursprung?
Jeder der sechs Servomotoren des Roboters hat einen einzigartigen örtlich festgelegten mechanischen Ursprung. Falsche Einstellung des mechanischen Ursprung des Roboters verursacht Probleme wie begrenzte oder falsche Bewegung des Roboters, der Unfähigkeit, in eine Gerade zu gehen und des schweren Schadens zum Roboter.
10. Wie man die Aktionsüberwachungswarnung von Roboter 50204 klärt?
1. Ändern Sie die Roboteraktion, die Parameter überwacht (im Bedienfeldaktionsüberwachungsmenü) um die tatsächliche Situation zusammenzubringen.
2. Verwenden Sie den AccSet-Befehl, die Beschleunigung des Roboters zu verringern.
3. verringern Sie v in Geschwindigkeit data_ die Fäulewahl.
11. Wie man die Warnung „50296, SMB-Gedächtnisdatenunterschied“ behandelt, wenn der Roboter an zum ersten Mal angetrieben wird?
1. Ausgewählte Kalibrierung vom ABB-Hauptmenü.
2. klicken Sie an ROB_ 1. eintragen den Kalibrierungsschirm und ausgewählte DAS SMB-Gedächtnis an.
3. tragen ausgewählte „moderne“, ein und klicken „klares Schaltschrank-Gedächtnis“ an.
4. Nach dem Abschluss klicken Sie „nahes“ an und klicken Sie dann „Aktualisierung“.
5. ausgewählter ‚ausgetauschter Schaltschrank oder Roboterarm, Schaltschrank mit SMB-Gedächtnisdaten aktualisierend‘.
12. Wie man die Geschwindigkeit der Roboterflugbahnbewegung im SCHNELLEN Programm besonders anfertigt?
1. Ausgewählte Programm-Daten vom Hauptmenü des Unterrichts hängend.
2. Nachdem Sie den Datentyp Speeddata gefunden haben, klicken Sie neues an.
3. klicken Sie an den Anfangswert, und die Bedeutungen der vier Variablen Speeddata sind: v_ TCP stellt die lineare Fahrgeschwindigkeit des Roboters, v_ Fäule darstellt die Drehzahl des Roboters, v_ Leax darstellt die lineare Arbeitsgeschwindigkeit der externen Achse, v_ Reax darstellt die Drehzahl der externen Achse dar. Wenn es keine externe Achse gibt, brauchen die letzten zwei nicht geändert zu werden.
4. Die kundengebundenen Daten können im SCHNELLEN Programm genannt werden.
13. Fehlersuche von 6 allgemeinen Störungen in der ABB-Roboter-Servobewegungsreparatur
1. Wie man den Bewegungsfehlerzählersammelfehler während der Hochgeschwindigkeitsrotation behandelt?
Bewegungsfehlerzählersammelstörung tritt während der Hochgeschwindigkeitsrotation auf.
Gegenmaßnahmen 1: Überprüfen Sie, wenn die Verdrahtung des Leistungsstärkekabels und des Kodiererkabels korrekt ist und ob das Kabel beschädigt wird.
Bewegungsfehlerzählersammelstörung tritt auf, wenn sie einen langen Befehlsimpuls eingibt.
Bewegungsfehlerzählersammelstörung trat während der Operation auf.
Gegenmaßnahmen 2: Erhöhen Sie den Sammelniveaueinstellwert des Fehlerzählers; Verlangsamen Sie die Umdrehungsgeschwindigkeit; Verlängern Sie die Beschleunigung und die Verzögerungszeit; Die Last ist zu schwer, und es ist notwendig, einen Motor der größeren Kapazität von Grund auf neu vorzuwählen oder die Last zu verringern und installiert Getriebeorganisationen wie Reduzierer, um die Last zu erhöhen.
2. Was sollte getan werden, wenn es nicht funktioniert, wenn es Impulsertrag gibt?
Überwachen Sie den gegenwärtigen Wert des Impulsertrages des Prüfers und ob das Impulsertraglicht blitzt, bestätigen Sie, dass der Befehlsimpuls erfüllt worden ist und jetzt normalerweise ausgibt;
Überprüfen Sie, ob der Seilzug, das Stromkabel und das Kodiererkabel vom Prüfer zum Fahrer falsch verdrahtet werden, beschädigt oder im schlechten Kontakt;
Überprüfen Sie, ob die Bremse des Servomotors mit Bremse jetzt geöffnet worden ist;
Überwachen Sie, ob die Platte des Servofahrers den Input von Impulsbefehlen bestätigt;
Der Laufoperationsbefehl ist normal;
Die Steuerform muss die Richtungssteuerform wählen;
Ist die Inputimpulsart, die durch den Servofahrer eingestellt wird, der mit der Einstellung des Befehlsimpulses in Einklang ist;
Garantieren Sie dass die positive Rotationsseite, die Antrieb gestoppt wird, das Rotationsseiten-Antriebshaltesignal und das zurückgestellte Signal des Fehlerzählers nicht eingegeben werden, wird die Last getrennt, und der Betrieb ohne Last ist normal. Überprüfen Sie das mechanische System.
3. Was sollte ich tun, wenn es keinen Überlastungsbericht mit Last gibt?
Wenn es auftritt, wenn das Servo-Laufsignal angeschlossen wird und kein Impuls wird ausgestrahlt:
Überprüfen Sie die Stromkabelverdrahtung des Servomotors, um zu sehen, wenn es irgendeinen Schaden des schlechten Kontakts oder des Kabels gibt; Wenn es ein Servomotor mit einer Bremse ist, muss die Bremse eingeschaltet werden; Ist der Gewinn der Geschwindigkeitsschleife einstellte zu hoch; Ist die Konstante der integralen Zeit der Geschwindigkeitsschleife einstellte zu klein.
Wenn die einzigen Servofunktionsstörungen während der Operation:
Ist der Gewinn des Azimutstromkreises einstellte zu hoch; Ist der Umfang der Positionierung von Fertigstellung einstellte zu klein; Überprüfen Sie, ob es keinen verschlossenen Rotor auf der Servomotorwelle gibt und justieren Sie die Maschinerie von Grund auf neu.
4. Wie man anormale Töne oder Erschütterungen während der Operation beschäftigt?
Servoverdrahtung:
Benutzen Sie standardisierte Stromkabel, Kodiererkabel, Steuerseile und Kabel, um auf Schaden zu überprüfen; Überprüfen Sie, wenn es Störquellen nahe der Steuerleitung gibt und ob sie parallel oder zu den nahe gelegenen hohen gegenwärtigen Stromkabeln zu nah sind; Überprüfen Sie, ob es irgendeine Änderung im Potenzial des Erdungsanschlusses, die ausgezeichnete Erdung sicherzustellen gibt.
Servoparameter:
Die Servogewinneinstellung ist zu groß, und es wird manuell oder justiert aktiv die Servoparameter von Grund auf neu empfohlen; Die Einstellung der Zeitkonstante des Geschwindigkeitswartefilters, mit einem Anfangswert von 0 bestätigend, ist- es möglich, den Sollwert zu erhöhen, indem man prüft; Die elektronische Gangverhältniseinstellung ist zu groß und befürwortet, um zu den Werkseinstellungen wieder herzustellen; Resonanz zwischen Servosystem und mechanischen dem System, Sperrfilterfrequenz und -umfang prüfend und justieren.
Mechanisches System:
Die Koppelung, welche die Motorwelle und das Ausrüstungssystem anschließt, wich ab, und die Installationsschrauben wurden nicht festgezogen; Schlechte Verpflichtung von Flaschenzügen oder von Gängen kann zu Änderungen im Lastmoment auch führen. Test-Betrieb ohne Last. Wenn Betrieb ohne Last normal ist, Kontrolle, wenn es irgendeine Abweichung im Verpfändungsteil des mechanischen Systems gibt; Lassen Sie ob die Laststrägheit, -drehmoment zu, und -geschwindigkeit sind zu groß, den Betrieb ohne Last prüfen Sie, und wenn der Betrieb ohne Last normal ist, die Last verringern Sie oder den Fahrer und den Motor durch eine größere Kapazität ersetzen Sie.
5. Wie man die ungenaue Orientierungssteuerung und die Positionierung während der ABB-Roboter-Servobewegungsreparatur behandelt?
Erstens bestätigen Sie, ob der tatsächliche angegebene Impulswert des Prüfers mit dem erwarteten Wert in Einklang ist, und wenn nicht, überprüfen Sie und korrigieren Sie das Programm;
Überwachen Sie, ob die Anzahl von den Impulsbefehlen, die durch den Servofahrer empfangen werden, das zusammenbringt, das vom Kontrolleur angekündigt wird. Wenn nicht, überprüfen Sie den Seilzug; Überprüfen Sie, ob die Einstellung der Servobefehlsimpulsform mit der Prüfereinstellung, wie CW/CCW oder pulse+direction in Einklang ist;
Die Servogewinneinstellung ist, bitte manuell zu groß oder justiert aktiv den Servogewinn von Grund auf neu; Der Servomotor ist für angesammelte Fehler während des Hin- und Herbewegung anfällig. Es wird empfohlen, um ein mechanisches Ursprungssignal unter die Bedingungen einzustellen, die durch den Prozess erlaubt werden und die UrsprungsSuchoperation durchführt, bevor der Fehler die erlaubte Skala übersteigt; Das mechanische System selbst hat niedrige Genauigkeit oder anormale Getriebeorganisation (wie Abweichung der Koppelung zwischen dem Servomotor und dem Ausrüstungssystem).
6. berichtete ABB-Roboter-Servobewegungsreparatur, Richtungskontrollfunktion, übergeschwindigkeitsstörung. Wie man sie behandelt?
Sobald das Servo-Laufsignal angeschlossen wird, löst es aus: überprüfen Sie, ob die Verdrahtung des Servoleistungsstärkekabels und des Kodiererkabels korrekt und unbeschädigt ist.
14. Wie tun Industrieroboter ABB durchmachen laufende Wartung?
Vor Normalbetrieb der „Bremsinspektion“, ist- es notwendig, die Bewegungsbremse jeder Achse zu überprüfen. Die Prüfmethode für die Bewegungsbremse ist-, wie folgt:
1. Lauf die Achse jedes Roboterarmes in seine Höchstlastposition.
2. Drehung das Bewegungsbetriebsarten-Wahl Anschaltung der Roboterprüfer zur MOTORruhestellung.
3. Überprüfen Sie, ob die Welle in seiner Ausgangsstellung ist. Wenn der Parallelgreifer noch seine Position beibehält, nachdem der Motor abgestellt ist, zeigt er an, dass die Bremse in gutem Zustand ist.
Gefahr der verlierenden Funktion der Verlangsamungsoperation (250mm/s)
Ändern Sie das Gangverhältnis oder andere Bewegungsparameter nicht vom Computer oder vom unterrichtenden Anhänger. Dieses beeinflußt die Funktion der Verlangsamungsoperation (250mm/s).
15. Einige Punkte, zu beachten, wenn sicher Lehrmittel verwendet werden:
Der ermöglichende Gerätknopf, der auf den unterrichtenden Anhänger installiert ist, wenn er in der Mitte gedrückt wird, ändert das System zu den MOTOREN AUF Modus. Wenn der Knopf freigegeben wird oder völlig gedrückt, Systemäenderung an den MOTOREN WEG vom Modus.
16. Um Lehrmittel sicher zu benutzen, müssen die folgenden Prinzipien gefolgt werden:
1.When der ermöglichende Gerätknopf kann seine Funktion nicht während der Programmierung oder des Ausprüfens verlieren, und der Roboter braucht nicht sich zu bewegen, den ermöglichenden Gerätknopf sofort freizugeben.
2. Wenn Programmierungspersonal eine Schutzzone betritt, müssen sie den unterrichtenden Anhänger auf ihrem Körper immer tragen, um zu verhindern, dass andere den Roboter bewegen.
17. Beim Arbeiten innerhalb des Arbeitsbereichs des Roboterarmes, müssen die folgenden Punkte beobachtet werden:
1. Der Betriebsarten-Wahl Schalter der Prüfer muss zur manuellen Position eingeschaltet werden, um das ermöglichende Gerät zu betreiben, um den Computer zu trennen oder entfernt zu funktionieren;
2. Wenn der Betriebsarten-Wahl Schalter eingeschaltet ist
3. Lohnaufmerksamkeit zur Drehachse des Roboterarmes, achtgeben, wenn Haar oder Kleidung oben gemischt erhält. Auch Lohnaufmerksamkeit zu anderen vorgewählten Komponenten oder Ausrüstung auf dem Roboterarm;
4. Überprüfen Sie die Bewegungsbremse jeder Achse.
18. Notenabweichung
Phänomen 1: Die Position, die durch die Finger berührt wird, stimmt nicht mit dem Mäusepfeil überein.
Grund: Nach der Installierung des Fahrerprogramms, berührte das Unterrichten hängend nicht vertikal die Mitte der Bullaugenposition während der Kalibrierung.
Lösung: Eichen Sie die Position nach.
Phänomen 2: Etwas Bereiche haben genaue Note, während andere Abweichung in der Note haben.
Ursache: Eine große Menge des Staubes oder der Skala sammelt auf den akustischen Reflexionsstreifen um den akustische Oberflächenwellen-Touch Screen an, der das Getriebe von akustischen Signalen beeinflußt.
Lösung: Säubern Sie den Touch Screen und besondere Aufmerksamkeit auf das Säubern der Schallwellereflexionsstreifen auf allen Seiten des Touch Screen lenken. Beim Säubern, trennen Sie die Stromversorgung der Touch Screen Steuerkarte.
19. Unterrichtende hängende Note keine Antwort
Phänomen: Wenn sie den Schirm berühren, bewegen sich die Mäusepfeile nicht und es gibt keine Änderung in Position.
Grund: Es gibt viele Gründe für dieses Phänomen, wie folgt:
1. Der Staub oder die Skala, die auf den akustischen Reflexionsstreifen um den akustische Oberflächenwellen-Touch Screen angesammelt wird, ist sehr ernst und veranlaßt den Touch Screen nicht zu funktionieren;
2. Touch Screen Funktionsstörung;
3. Die Touch Screen Steuerkarte hat versagt;
4. Die Touch Screen Bus-Leitung hat versagt;
5. Die serielle Schnittstelle der Wirtsfunktionsstörungen;
6. Das Betriebssystem des Unterrichtens hängend hat versagt;
7. Touch Screen Fahrerinstallationsfehler.
Lösung: Beobachten Sie die Touch Screen Signal-Anzeigelampe, die regelmäßig unter normalen Umständen blitzt, ungefähr einmal pro zweite.
Wenn er den Schirm berührt, geht der unterrichtende Anhänger schwarz, der ein komplexes Problem ist. Wenn Hintergrundbeleuchtungsenergieeinsparung eingestellt wird, ist schwarzer Schirm normal; Wenn das zweite Wort in der Systemkontrollzone versehentlich bearbeitet wird, geht der Schirm auch schwarz. Wenn die ersten zwei Punkte ausgeschlossen werden, Aktualisierung zu den spätesten Mikroprogrammaufstellung für Bericht.
Schicken Sie uns Ihre Untersuchung direkt

