
Herkunftsort:
China
Markenname:
YOUNGYOU
Zertifizierung:
CE
Modellnummer:
GBS6-C1400
Kontakt US

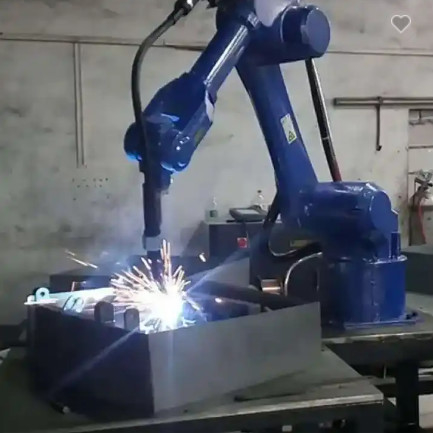



6 Achsen-automatischer schweißender Roboter mit elektrischem Schweißgerät CHD MIG 500 und schweißendem Stellwerk
Ultraschallnavigations-und Positionierungs-Technologie für mobile Roboter
Das Arbeitsprinzip der Ultraschallnavigation und der Positionierung ist auch dem von Laser und von Infrarot ähnlich. Normalerweise werden Ultraschallwellen durch die Emissionssonde des Ultraschall-Sensors und die Ultraschallwellentreffenhindernisse im Medium und zum empfangenden Gerät zurückzugehen ausgestrahlt.
Indem man das Ultraschallreflexionssignal empfängt, das durch selbst ausgestrahlt wird und den Ausbreitungsabstand berechnet S, der auf dem Zeitunterschied zwischen der Ultraschallemission und der Echoaufnahme basiert, sowie die Ausbreitungsgeschwindigkeit kann der Abstand vom Hindernis zum Roboter erhalten werden. Es gibt eine Formel: S=Tv/2, wo T - der Zeitunterschied zwischen der Ultraschallemission und Aufnahme; V - die Geschwindigkeit von den Ultraschallwellen, die im Medium fortpflanzen.
Selbstverständlich, gibt es auch viel Navigation des mobilen Roboters und Technologien in Position bringend, die das unterschiedliches Übertragen und Empfangseinrichtung benutzen. Mehrfache Empfangseinrichtung wird in der Klimakarte vereinbart, während übertragende Sonden auf den mobilen Roboter installiert sind.
In der Navigation und in der Positionierung von mobilen Robotern, wegen der inhärenten Defekte von Ultraschall-Sensoren, wie Spiegelreflexion und begrenztem Öffnungswinkel, ist es schwierig, umgebende Umweltinformation völlig einzuholen. Deshalb werden die Ultraschall-Sensoren, die aus mehrfachen Sensoren bestehen, normalerweise benutzt, um entsprechende Klimamodelle herzustellen, und die Informationen, die durch die Sensoren gesammelt werden, werden dem Kontrollsystem des mobilen Roboters durch Serienkommunikation übermittelt, verwendet das Kontrollsystem dann bestimmte Algorithmen, um die entsprechenden Daten zu verarbeiten, die auf den gesammelten Signalen und dem hergestellten mathematischen Modell, die PositionsUmweltinformation des Roboters einzuholen basieren.
Wegen der Vorteile von niedrigen Kosten, von schneller Informationssammlungsrate und von hoher Abstandsentschließung, sind Ultraschall-Sensoren lang in der Navigation und in der Positionierung von mobilen Robotern weitverbreitet gewesen. Außerdem erfordert er nicht komplexe Bildausrüstungstechnologie, wenn er Umweltinformation, mit dem Ergebnis der schnellen Erstreckungsgeschwindigkeit und der guten Realzeitleistung sammelt.
Gleichzeitig sind Ultraschall-Sensoren auch gegen externe Umweltbedingungen wie Wetterbedingungen, Umgebungslicht, Hindernisschatten und Oberflächenrauigkeit weniger anfällig. Ultraschallnavigation und die Positionierung sind in den verschiedenen Vorstellungssystemen von mobilen Robotern weitverbreitet gewesen.
![]()
Über die Firma
Unsere Führungsschiene hat mit vielen internationalen weithin bekannten Robotermarken, wie ABB KUKA FANUC Yaskawa UR zusammengearbeitet. Die Firmen, die umfassen betroffen sind hauptsächlich, die Palettierung, Be- und Entladung. Die Last der Führungsschienestrecken von 500kg zu 5000kg. Die Länge der Führungsschiene wird entsprechend dem Bedarf von Kunden besonders angefertigt. Wir haben einen Fall gemacht, dass ein Roboter ABB IRB6700 20 CNC-Maschinen entspricht und eine 50m lange Führungsschiene das Hin- und Herbewegung, Be- und Entladung des Roboters abschließt. Die Anzahl von Robotern wird groß verringert und die Integrationskosten werden gespart.
Unsere Firma bietet auch Industrieroboter zu sehr vorteilhaften Preisen an, um Aufträge zu niedrigeren Preisen zusammen zu vergeben.
Willkommen nach Shanghai, China, unsere Roboter und Schienen nachforschen!
Firmenprodukt-Versorgung
ABB-Roboter
KUKA-Roboter
Yaskawa-Roboter
Fanuc-Roboter
UR-Roboter
Cobot
Führungsschiene
Cobot machte in China
Produktbeschreibungen
ProduktParameterleiste
![]()
![]()
![]()
![]()
Verpacken und Transport
![]()
![]()
Schicken Sie uns Ihre Untersuchung direkt

