
Herkunftsort:
China
Markenname:
YOUNGYOU
Zertifizierung:
CE
Modellnummer:
PY4030U-050
Kontakt US
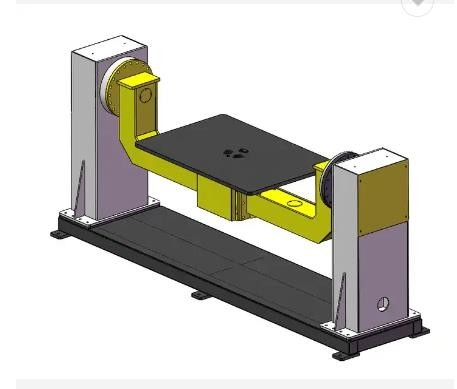




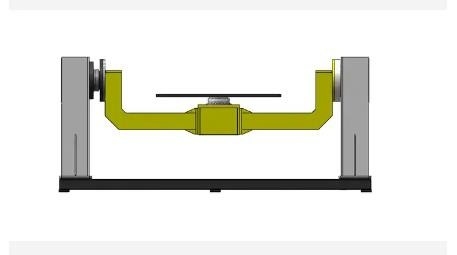
Gemacht Porzellan 1200*1200 Achsenlast 100-1000kg der Drehscheiben-380v 50-60hz im zweiachsigen schweißenden Stellwerk
Helle Reflexionsnavigation und Positionierungstechnologie für mobile Roboter
Die typische helle Reflexionsnavigation, die Methode benutzt in Position bringt hauptsächlich, Laser oder Infrarot-Sensoren für die Erstreckung. Laser und Infrarot helle Reflexionstechnologie für Navigation und die Positionierung einsetzen.
Das Laser-globale Positionsbestimmungssystem besteht im Allgemeinen aus einem drehenden Mechanismus Lasers, ein Reflektor, ein optoelektronisches empfangendes Gerät und eine Datenerfassung und eine Übertragungseinrichtung.
Während der Operation wird der Laser nach außen durch einen Mechanismus des drehenden Spiegels ausgestrahlt. Wenn man einen kooperativen Markstein scannt, der aus einem rückwärtigen Reflektor besteht, wird das reflektierte Licht durch einen photoelektrischen Empfänger als Entdeckungssignal verarbeitet. Das Datenerfassungsprogramm wird gestartet, um die Codescheibendaten des drehenden Mechanismus (der gemessene Winkelwert des Ziels) zu lesen und übermittelt dann dem oberen Computer für Datenverarbeitung durch Kommunikation. Basiert auf der bekannten Position des Marksteins und der ermittelten Informationen, können die aktuelle Position und die Richtung des Sensors in das Marksteinkoordinatensystem berechnet werden, um weitere Navigation und die Positionierung zu erzielen.
Lasererstreckung hat die Vorteile des schmalen Strahls, des guten Parallelismus, des kleinen Zerstreuens und der hohen Auflösung in Erstreckungsrichtung, aber es wird auch groß durch Umweltfaktoren beeinflußt. Deshalb wie zum denoise das gesammelte Signal, wenn es Lasererstreckung verwendet, auch eine große Herausforderung ist. Darüber hinaus hat Laser, der sich auch erstreckt, die blinden Flecke, macht es schwierig, Navigation zu erzielen und nur bringt durch Laser in Position. In den industriellen Anwendungen im Allgemeinen ist er in der industriellen Prüfung vor Ort innerhalb eines spezifischen Bereiches, wie Entdeckung von Rohrleitungssprüngen noch weitverbreitet.
Infrarotabfragungstechnologie ist in den multi gemeinsamen Roboterhindernis-Vermeidungssystemen häufig benutzt, ein großes Gebiet des Roboters „empfindliche Haut“ zu bilden, der die Oberfläche des Roboterarmes umfasst und die verschiedenen Gegenstände ermitteln kann, die durch den Roboterarm während der Operation angetroffen werden.
Ein typischer Infrarot-Sensor schließt eine Festkörperleuchtdiode mit ein, die Infrarotlicht und eine lichtempfindliche Festkörperdiode ausstrahlen kann, die als Empfänger dient. Das modulierte Signal wird durch ein lichtemittierendes Infrarotrohr ausgestrahlt, und das lichtempfindliche Infrarotrohr empfängt das modulierte Infrarotsignal, das durch das Ziel reflektiert wird. Die Beseitigung der Klimainfrarotstörung wird durch Signalmodulation und einen engagierten IR-Filter sichergestellt. Wenn das Ausgangssignal Vl den Spannungsertrag der reflektierten Lichtstärke darstellt, dann ist Vl eine Funktion des Abstandes zwischen der Sonde und dem Werkstück: Vo=f (x, P), wo p der Reflexionsfaktor des Werkstückes ist. P hängt mit der Oberflächenfarbe und der Rauheit des Zielgegenstandes zusammen. X - Abstand zwischen der Sonde und dem Werkstück.
Wenn das Werkstück ein Ziel der gleichen Art mit dem gleichen Pwert ist, entsprechen x und Vl eins-zu-eins. X kann erhalten werden, indem man die experimentellen Daten von Nähemaßen von verschiedenen Zielgegenständen interpoliert. Auf diese Art kann der Abstand zwischen dem Roboter und dem Zielgegenstand unter Verwendung der Infrarot-Sensoren gemessen werden, und andere informationsverarbeitende Methoden können auch angewendet werden, um den mobilen Roboter zu steuern und zu lokalisieren.
Obgleich Infrarotabfragungsauch in Position bringen Vorteile wie hohe Empfindlichkeit, einfache Struktur und niedrige Kosten hat, wegen ihrer Entschließung des hohen Winkels und der niedrigen Abstandsentschließung, sind sie als Annäherungssensoren in den mobilen Robotern allgemein verwendet, das Nähern oder plötzliche Bewegungshindernisse zu ermitteln und erleichtern Notdas stoppen von Robotern.
![]()
Über die Firma
Unsere Führungsschiene hat mit vielen internationalen weithin bekannten Robotermarken, wie ABB KUKA FANUC Yaskawa UR zusammengearbeitet. Die Firmen, die umfassen betroffen sind hauptsächlich, die Palettierung, Be- und Entladung. Die Last der Führungsschienestrecken von 500kg zu 5000kg. Die Länge der Führungsschiene wird entsprechend dem Bedarf von Kunden besonders angefertigt. Wir haben einen Fall gemacht, dass ein Roboter ABB IRB6700 20 CNC-Maschinen entspricht und eine 50m lange Führungsschiene das Hin- und Herbewegung, Be- und Entladung des Roboters abschließt. Die Anzahl von Robotern wird groß verringert und die Integrationskosten werden gespart.
Unsere Firma bietet auch Industrieroboter zu sehr vorteilhaften Preisen an, um Aufträge zu niedrigeren Preisen zusammen zu vergeben.
Willkommen nach Shanghai, China, unsere Roboter und Schienen nachforschen!
Firmenprodukt-Versorgung
ABB-Roboter
KUKA-Roboter
Yaskawa-Roboter
Fanuc-Roboter
UR-Roboter
Cobot
Führungsschiene
Cobot machte in China
Produktbeschreibungen
ProduktParameterleiste


Verpacken und Transport
![]()
![]()
Schicken Sie uns Ihre Untersuchung direkt




