
Herkunftsort:
China
Markenname:
YOUNGYOU
Zertifizierung:
CE RoHS
Modellnummer:
EPG50-060
Kontakt US


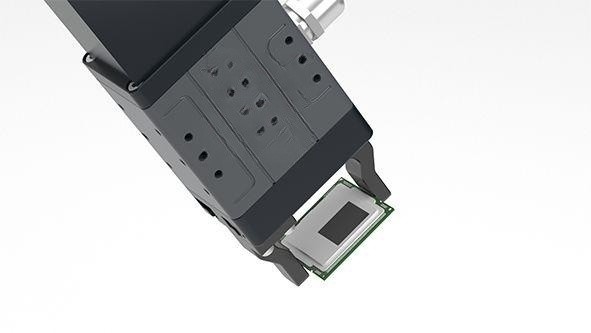
Roboter-Arm Grippers.Stroke 50mm Achse der Industrieroboter-elektrischer Roboter-Handgreifer 6
Produktübersicht
In automatisierten Fertigungsstraßen ist Zeit-Leistungsfähigkeit sehr wichtig. Die Geschwindigkeit von elektrischen Greifern kann Produktions-Leistungsfähigkeit erheblich verbessern und die Aufwartung und die Aufenthaltsdauer der Fertigungsstraße verringern. Während des Prozesses der Ergreifungsund Übertragungseinzelteile können elektrische Greifer Einzelteile auf den Zielstandort in einer sehr kurzen Zeit greifen oder übertragen und den verlängerten Aufenthalt von Einzelteilen in der Maschine vermeiden, den Produktionszyklus verkürzen, und Produktions-Leistungsfähigkeit verbessern. Außerdem wegen der Geschwindigkeit von elektrischen Greifern, ergreifender und von Getriebeaufgaben in der gleichen Zeit abgeschlossen werden, können die Maximierung der Ausgabegeschwindigkeit der Fertigungsstraße und das Erzielen von höheren Gewinnen und von wirtschaftlichem Nutzen.
Wegen seiner Fehlerdiagnosefähigkeit, kombiniert mit dem Status des Umgebungslichts, macht der elektrische Greifer es einfach, damit Benutzer bestimmen, ob es eine Greiferstörung oder eine integrierte Prüferhinterstörung ist. Wenn die Greiferstörung bestimmt wird, ist die einfachste Weise, den elektrischen Greifer direkt zu ersetzen, der extrem bequem ist. Danach gibt es einige Aspekte wie Standortanpassung, Fehlerkontrolle mit Rückwärtsübertragung, Standardisierungsniveau, Instandhaltungskosten, Nutzungsdauer, Verwundbarkeit, synchrone Steuerung der multi Maschine, bewegliche Plattformverwendung, Preis, etc.
Über die Firma
Unsere Führungsschiene hat mit vielen internationalen weithin bekannten Robotermarken, wie ABB KUKA FANUC Yaskawa UR zusammengearbeitet. Die Firmen, die umfassen betroffen sind hauptsächlich, die Palettierung, Be- und Entladung. Die Last der Führungsschienestrecken von 500kg zu 5000kg. Die Länge der Führungsschiene wird entsprechend dem Bedarf von Kunden besonders angefertigt. Wir haben einen Fall gemacht, dass ein Roboter ABB IRB6700 20 CNC-Maschinen entspricht und eine 50m lange Führungsschiene das Hin- und Herbewegung, Be- und Entladung des Roboters abschließt. Die Anzahl von Robotern wird groß verringert und die Integrationskosten werden gespart.
Unsere Firma bietet auch Industrieroboter zu sehr vorteilhaften Preisen an, um Aufträge zu niedrigeren Preisen zusammen zu vergeben.
Willkommen nach Shanghai, China, unsere Roboter und Schienen nachforschen!
Firmenprodukt-Versorgung
ABB-Roboter
KUKA-Roboter
Yaskawa-Roboter
Fanuc-Roboter
UR-Roboter
Cobot
Führungsschiene
Cobot machte in China
Produktbeschreibungen
| Bestellnummer |
EPG50-060-0L#-C0024-P40-A
|
| Justierbarer Anschlag | 0-50 Millimeter |
| Einzelne Fingerspannkraft | 2-60 N |
| Öffnung/Feierabend | 0.6s |
| Positionswiederholbarkeit | ±0.02 Millimeter |
| Höchstlastgewicht | 1 Kilogramm |
| Ist es gestützt | Unterstützung |
| Verwendungsumwelt | 5-40 ℃, unterhalb 85% relativer Feuchtigkeit |
| Betriebsgeräusch | DB <40 |
| Körpergewicht | 0,80 Kilogramm |
| IP-GRAD | IP 40 |
| Nennspannung | DC 24±10% V |
| Maximaler Strom | 1,5 A |
| Nennstrom | 0,4 A |
| Übertragungsprotokoll | Modbus RTU (RS 485)
Digital Input/Output
|
| Willigt mit internationalen Standards ein | CER, RoHS |
| Vertikale zulässige statische Belastung Fz | 200N |
| Zulässiger Drehmoment von Schieber MX | 2 .5N·m |
| Zulässiger Drehmoment des Schiebers mein | 2 N·m |
| Zulässiger Drehmoment MZ des Schiebers | 2,8 N·m |
ProduktParameterleiste
![]()
![]()
![]()
Verpacken und Transport
![]()
![]()
Schicken Sie uns Ihre Untersuchung direkt

