
Herkunftsort:
China
Markenname:
YOUNGYOU
Zertifizierung:
CE RoHS
Modellnummer:
EPG50-100
Kontakt US
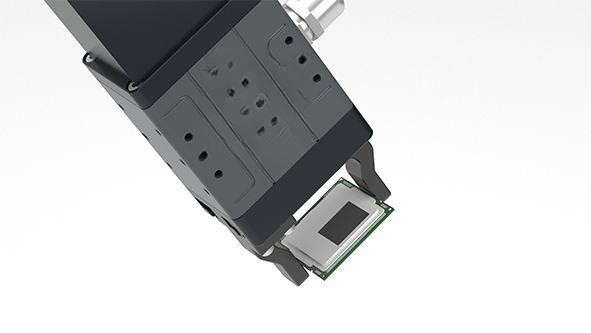


Hohe Qualität EPG50-100 einfach, Roboter-Arm-pneumatischen Greifer/Spannkraft 100N aufzuwenden
Produkteinführung
Die Genauigkeit von elektrischen Greifern ist ein wichtiger Teil Gewährleistung des reibungslosen Funktionierens der automatisierten Fertigungsstraßen und bezieht die Genauigkeit des Einzelteilfestklemmens und -getriebes mit ein. Sobald Abweichungen oder Fehler auftreten, führen möglicherweise sie zu Probleme im folgenden Produktionsverfahren und beeinflussen den Normalbetrieb der gesamten Fertigungsstraße. Deshalb wenn entwerfende und herstellende elektrische Greifer, Aufmerksamkeit zu den Genauigkeitserwägungen gezahlt werden sollten. Indem man moderne Spannvorrichtungen und Kontrollsysteme annimmt, können die Genauigkeit und die Stabilität der Einzelteil-Ergreifung und -getriebes sichergestellt werden.
Die Spannvorrichtung des elektrischen Greifers ist entscheidend. Während des Prozesses der Ergreifung von Einzelteilen, muss die Einspannvorrichtung die ergreifende Kraft und die Position genau steuern, um Verschiebung oder das Fallen von Einzelteilen während der Ergreifung und des Getriebes zu vermeiden. Zum Beispiel wenn die Ergreifung und die Übermittlung von flachen Einzelteilen, unter Verwendung einer Klammer mit einer Druckfeder die Stabilität der Spannkraft und der Position sicherstellen können, bei Einzelteilen von verschiedenen Formen und von Stärken auch sich anpassen; Wenn die Ergreifung und das Übertragen Kreisvon einzelteilen, ein gebogener Greifer verwendet wird, um die ergreifende Position und den Winkel genau zu steuern und die Genauigkeit und die Stabilität der Einzelteil-Ergreifung und -getriebes sicherstellt.
Über die Firma
Unsere Führungsschiene hat mit vielen internationalen weithin bekannten Robotermarken, wie ABB KUKA FANUC Yaskawa UR zusammengearbeitet. Die Firmen, die umfassen betroffen sind hauptsächlich, die Palettierung, Be- und Entladung. Die Last der Führungsschienestrecken von 500kg zu 5000kg. Die Länge der Führungsschiene wird entsprechend dem Bedarf von Kunden besonders angefertigt. Wir haben einen Fall gemacht, dass ein Roboter ABB IRB6700 20 CNC-Maschinen entspricht und eine 50m lange Führungsschiene das Hin- und Herbewegung, Be- und Entladung des Roboters abschließt. Die Anzahl von Robotern wird groß verringert und die Integrationskosten werden gespart.
Unsere Firma bietet auch Industrieroboter zu sehr vorteilhaften Preisen an, um Aufträge zu niedrigeren Preisen zusammen zu vergeben.
Willkommen nach Shanghai, China, unsere Roboter und Schienen nachforschen!
Firmenprodukt-Versorgung
ABB-Roboter
KUKA-Roboter
Yaskawa-Roboter
Fanuc-Roboter
UR-Roboter
Cobot
Führungsschiene
Cobot machte in China
Produktbeschreibungen
| Bestellnummer |
EPG50-100-0L#-C0024-P40-A
|
| Justierbarer Anschlag | 0-50 Millimeter |
| Einzelne Fingerspannkraft | 40-100 N |
| Öffnung/Feierabend | s 1,10 |
| Positionswiederholbarkeit | ±0.02 Millimeter |
| Höchstlastgewicht | 2 Kilogramm |
| Ist es gestützt | Unterstützung |
| Verwendungsumwelt | 5-40 ℃, unterhalb 85% relativer Feuchtigkeit |
| Betriebsgeräusch | DB <40 |
| Körpergewicht | 0,53 Kilogramm |
| IP-GRAD | IP 40 |
| Nennspannung | DC 24±10% V |
| Maximaler Strom | 0,6 A |
| Nennstrom | 0,25 A |
| Übertragungsprotokoll | Modbus RTU (RS 485)
Digital Input/Output
|
| Willigt mit internationalen Standards ein | CER, RoHS |
| Vertikale zulässige statische Belastung Fz | 200N |
| Zulässiger Drehmoment von Schieber MX | 2,5 N·m |
| Zulässiger Drehmoment des Schiebers mein | 2 N·m |
| Zulässiger Drehmoment MZ des Schiebers | 2,8 N·m |
ProduktParameterleiste
![]()
![]()
Verpacken und Transport
![]()
![]()
Schicken Sie uns Ihre Untersuchung direkt

